Robot Gripper Designs

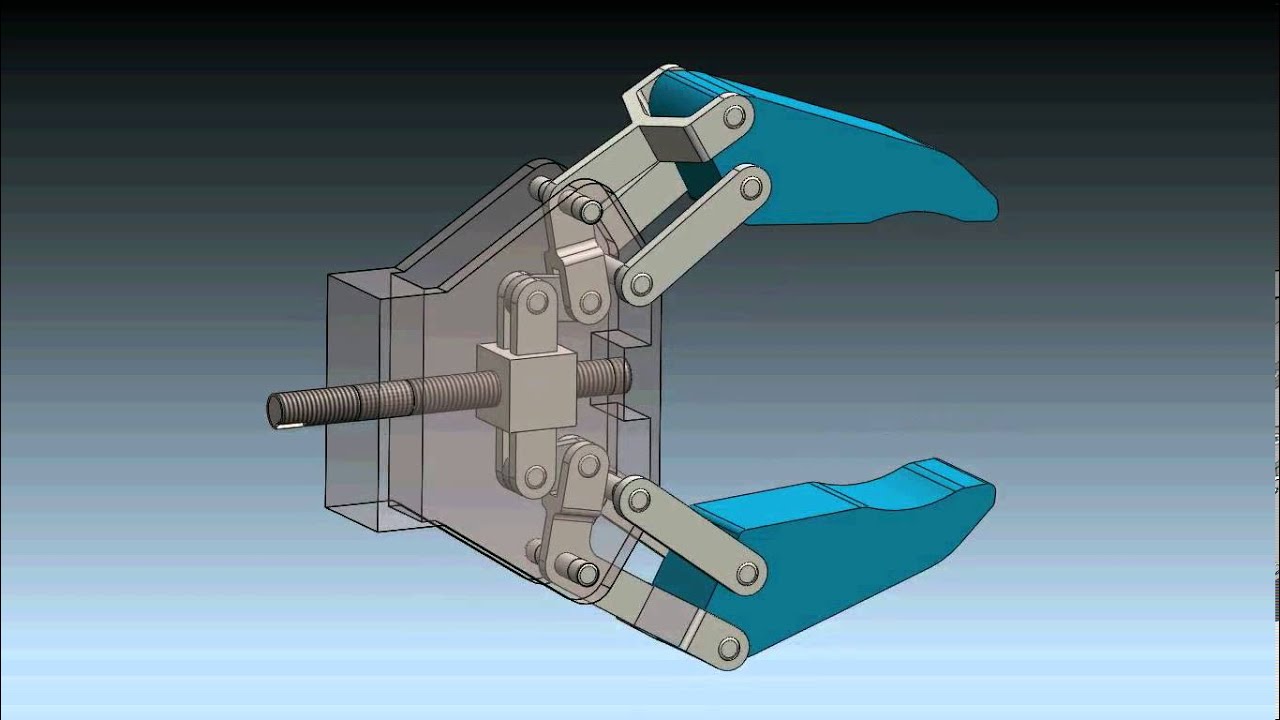
Robotic Gripper Mechanism Robotic Gripper Design Solidworks Assembly Of Gripper End Effector Youtube

Robotics Robot Gripper Robot Arm Mechanical Design
Robot Gripper Mechanism In Solidworks 2012 Youtube

Robot Gripper Improvements Robot Gripper Solidworks Clothes Hanger
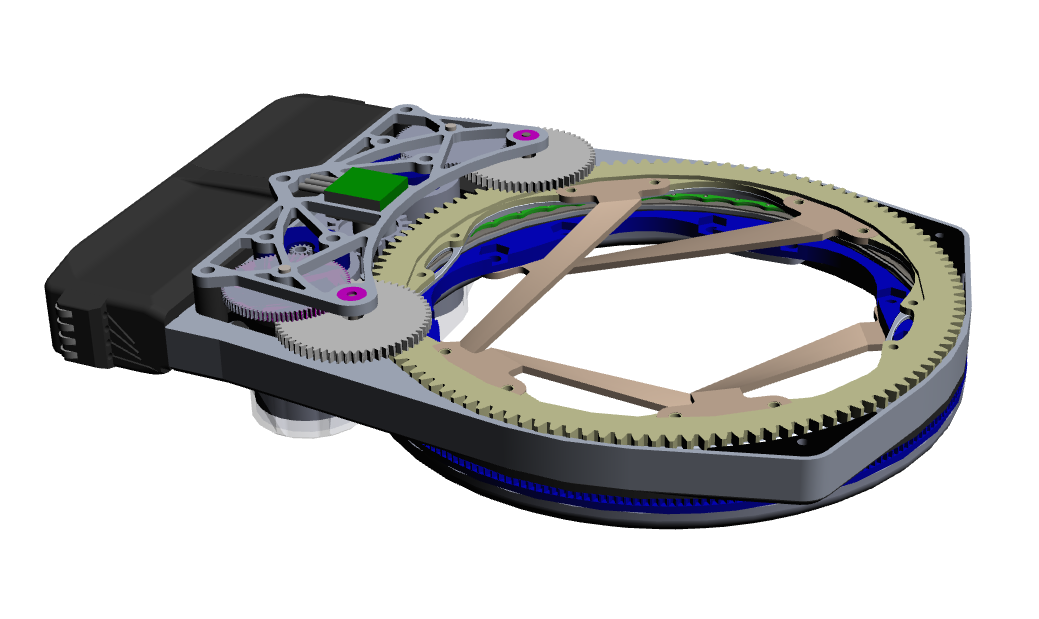
John Romanishin Thesis Gripper

Design Of Robot Gripper 3d Cad Model Library Grabcad

Here guidelines are presented which can be applied to a wide variety of grippers.
Robot gripper designs. Oct 7 2018 explore hong peter s board gripper on pinterest. Solidworks 2016 solidworks 2015 step iges rendering may 2nd 2018 robot gripper. The robotiq product is a commercial and robust product design for the universal robot. There are semi professional 3d printed robot grippers in design platforms such as grabcad and autodesk academy among others that can be instantly manufactured by the user.
Robotic grippers are the most common type of end effector that is integrated with industrial robots they can be utilized for a number of automated material handling and robotic assembly applications as they are much more versatile and adaptable than other application specific end of arm tooling devices. Idea making and designing a flexible and adaptable gripper for robotic products is important amazing and interesting. The majority of grippers are variations of three fundamental designs. Our gripper exterior design inspired by that.
Design of robot gripper. Those that improve system throughput those that increase system reliability and those that decrease cost. Parallel three finger and angled grippers. Selecting the right robotic gripper may seem like a daunting task.
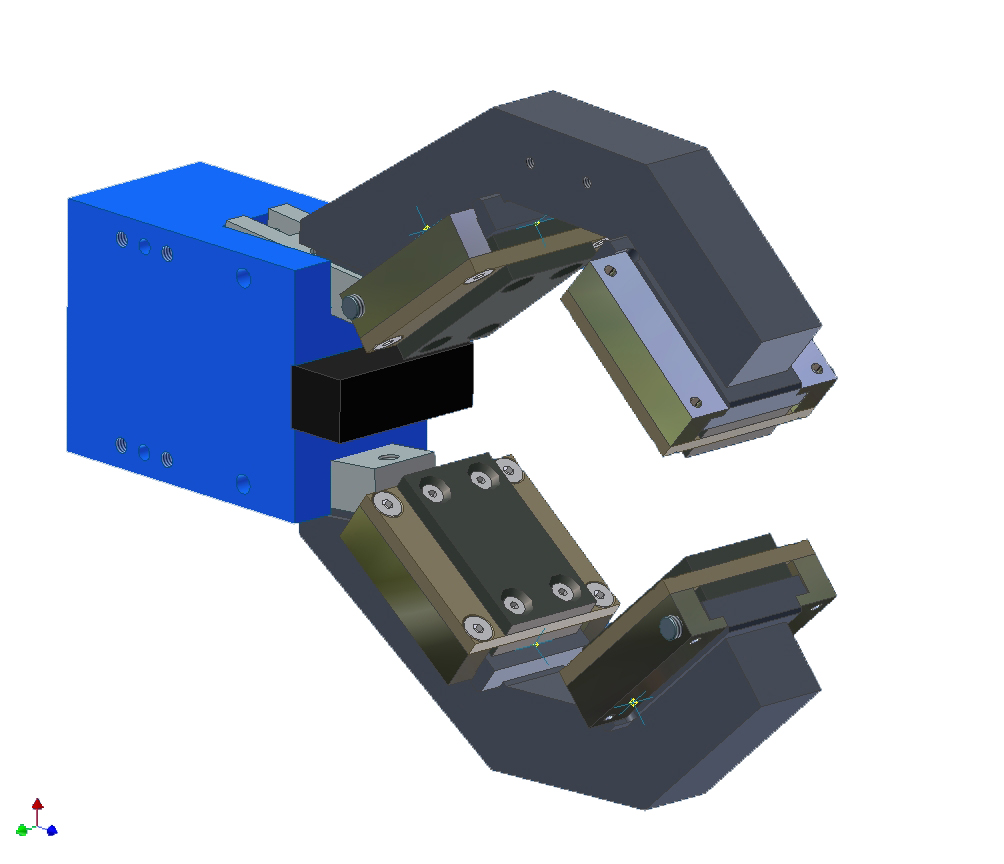
The equilibrium line is the region where all the magic happens. Guidelines are divided into three major categories. Mechanical design of a robot s gripper 2015 2 1 1 introduction my project consists in the mechanical design of a robot s gripper. Therefore we designed the first finger so that it can be moved such that it allows the gripper mode to be changed between the cross mode and the opposite mode.
Since the robot gripper is designed to perform an encompassing grip the equilibrium point must be considered in the design of your custom fingertips. This gripper is composed of two servomotors that allow the movement of the wrist and the movement of the grippers. Due to these two movements we would be able to take every object we want. Seriously if a force is applied below the equilibrium line the phalanx rotates until it comes in contact with an object.
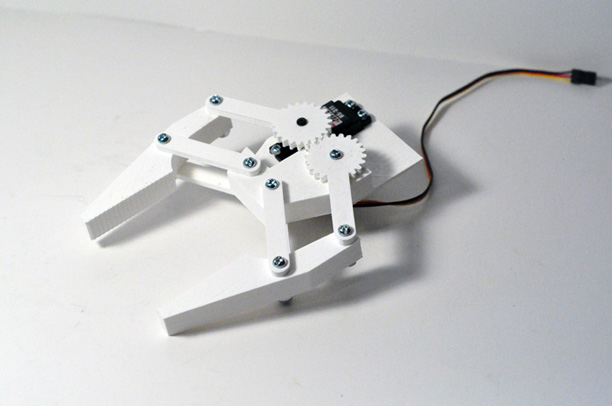
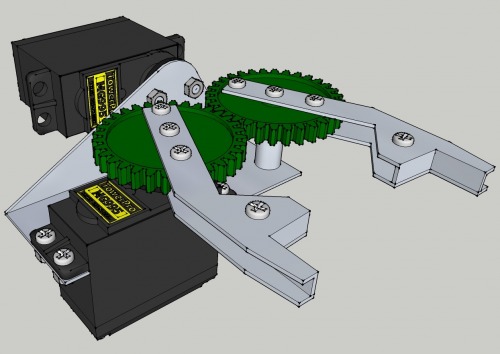
See more ideas about robot arm robot gripper robot. Robot gripper design 3 1 hardware design when the gripper grasps a small object the fingers have to face each other. This is done by means of a rack gear and a pinion.

X4m Metal Gripper Kit Metal Robot Design Robot Gripper

Introduction To Designing Robot Gripper Finger Tooling Gripshape

Robot Gripper Autodesk Online Gallery

Ultimate Guide To Product Design Design Gripper For Robotic Udemy
Robotic Gripper Kwartzlab Makerspace

The Final Design Constrains Gripper Travel Using A Pair Of Bearing Download Scientific Diagram
Robotic Arm Gripper Design Stlfinder

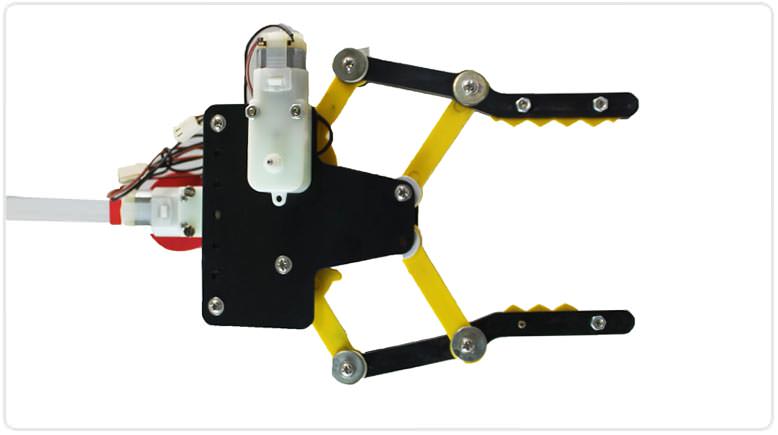
Robot Arm 4 Bar Linkage End Effector Robot Gripper 11037 Robotpark Academy

Robot Gripper 9g Micro Servo By Yisparyan Thingiverse Robot Gripper Robot Design Future Technology Gadgets

Solidworks Tutorial Robot Gripper Mechanism Design Assembly And Motion Study Youtube

Question 20 Mechanical Design Simplicity Experiment Appendix

Design Of Three Fingered Robot Gripper Mechanism Semantic Scholar

Parallel Grippers Designed For Collaborative Robot Precision

Gripper 3d Cad Model Library Grabcad

Question 20 Mechanical Design Simplicity Experiment Appendix
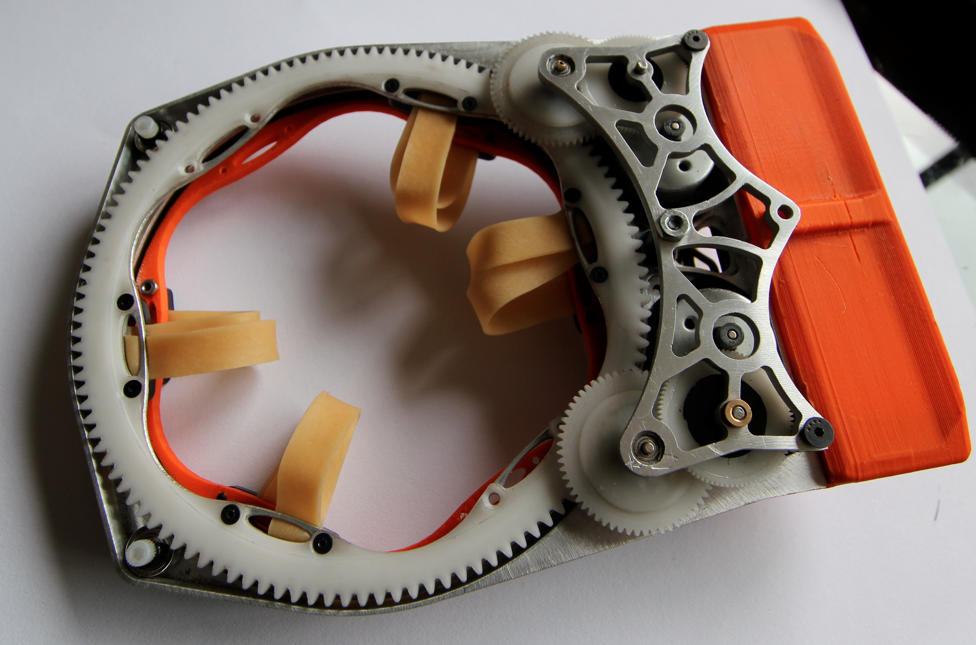
John Romanishin Thesis Gripper

Robot Gripper Design Assembly And Motion Study In Solidworks Youtube

Robot Fin Gripper 3d Cad Model Library Grabcad
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcr2tcawnpvad Aspyj8 Thzhf4x Yqwf4powji74kkr4njf6ivs Usqp Cau
Gripper Robotics

Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcqg7lsqcw9sef2u Clx3cxjihp2m5fho7l4aw Usqp Cau
Robotic Gripper 2 Days Workshop By Robosapiens Technologies
Design Of A Two Fingered Friction Gripper For A Wheel Mobile Robot Springerlink
Design Guidelines For Pneumatic Gripper

Design Of Three Fingered Robot Gripper Mechanism Semantic Scholar

Three Dimensional Design Of Robot Gripper Download Scientific Diagram

10 Best Robot Gripper Images Robot Gripper Robot Robot Arm
Robot Arm 4 Bar Linkage End Effector Robot Gripper 11037 Robotpark Academy

The Difference Between Robotic Grippers With Parallel Three Finger And Angled Designs Machine Design

Cl 5 Claws Robot Mechanical Claw Metal Robotic Arm Gripper Compatible With Mg996r Etc For Robot Hand Design Diy Robot Arm Gripper Robot Grippergripper Robot Aliexpress

Rg2 Robot Gripper A Flexible End Of Arm Tooling Gripper Onrobot

6 Advances In Robot Grippers For Robotics Developers To Watch

Robotic Gripper Design And Kinematic Model Download Scientific Diagram
