Puma 560 Robot Manipulator
The Six Degree Of Freedom Puma 560 Robot Manipulator Download Scientific Diagram

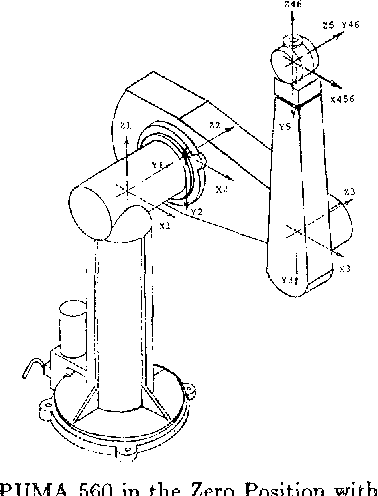
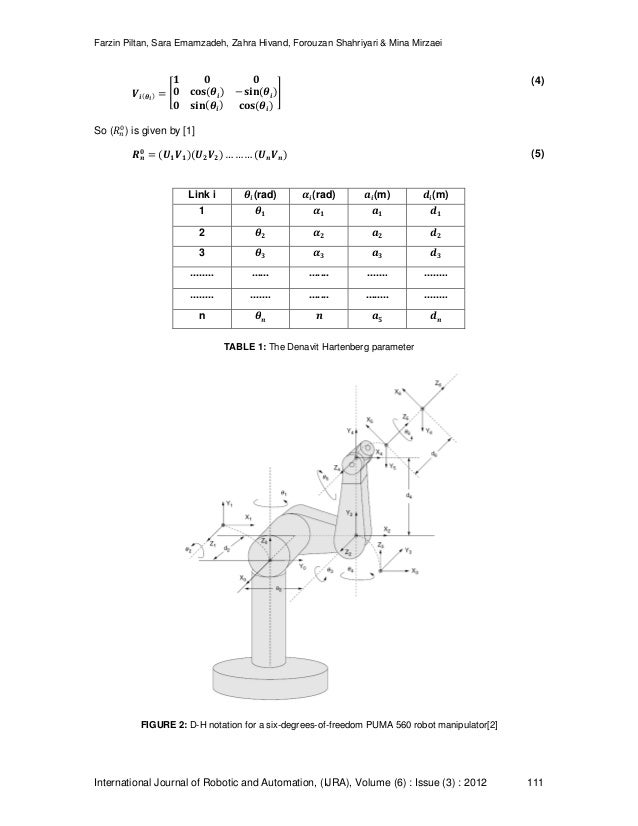
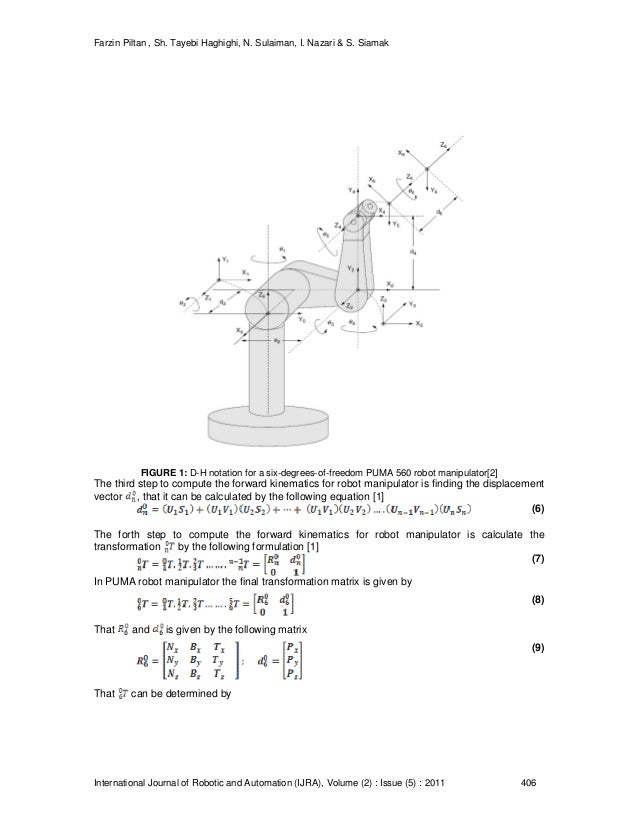
D H Notation For A Six Degrees Of Freedom Puma 560 Robot Manipulator 2 Download Scientific Diagram

A Puma 560 Robot Manipulator And A Prescribed Path Given By Initial And Download Scientific Diagram

D H Notation For A Six Degrees Of Freedom Puma 560 Robot Manipulator 2 Download Scientific Diagram

Robot Puma 560 3d Cad Model Library Grabcad
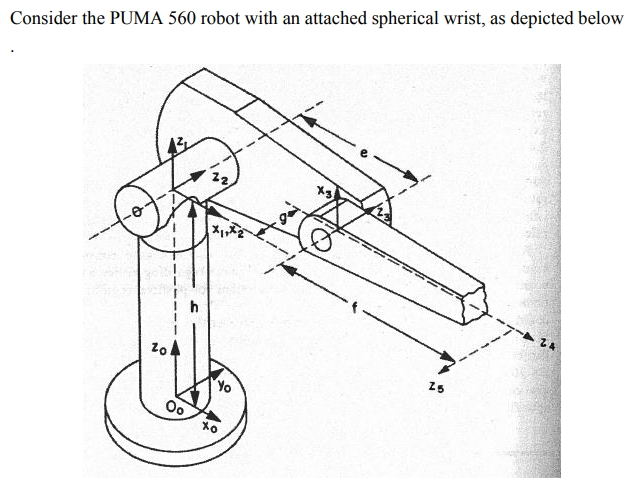
Solved Consider The Puma 560 Robot With An Attached Spher Chegg Com
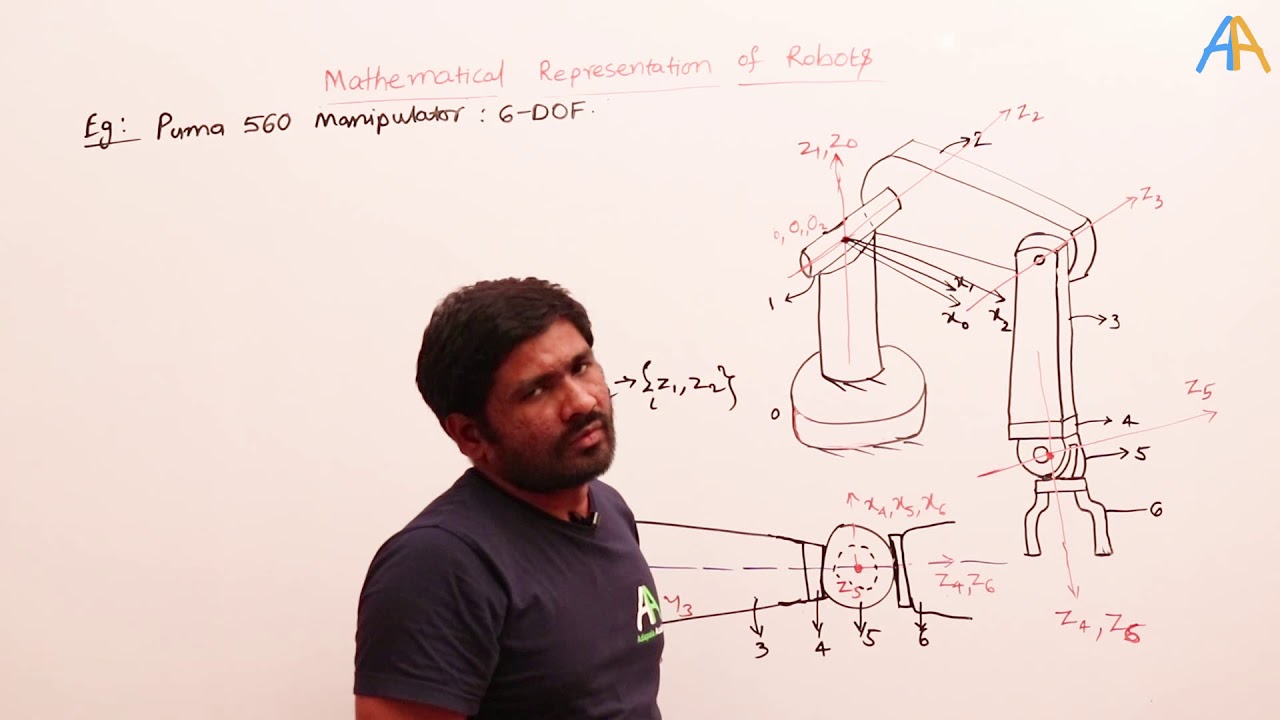
This paper focuses on two main areas namely robot manipulator analysis and implementation and design analyzed and implement.
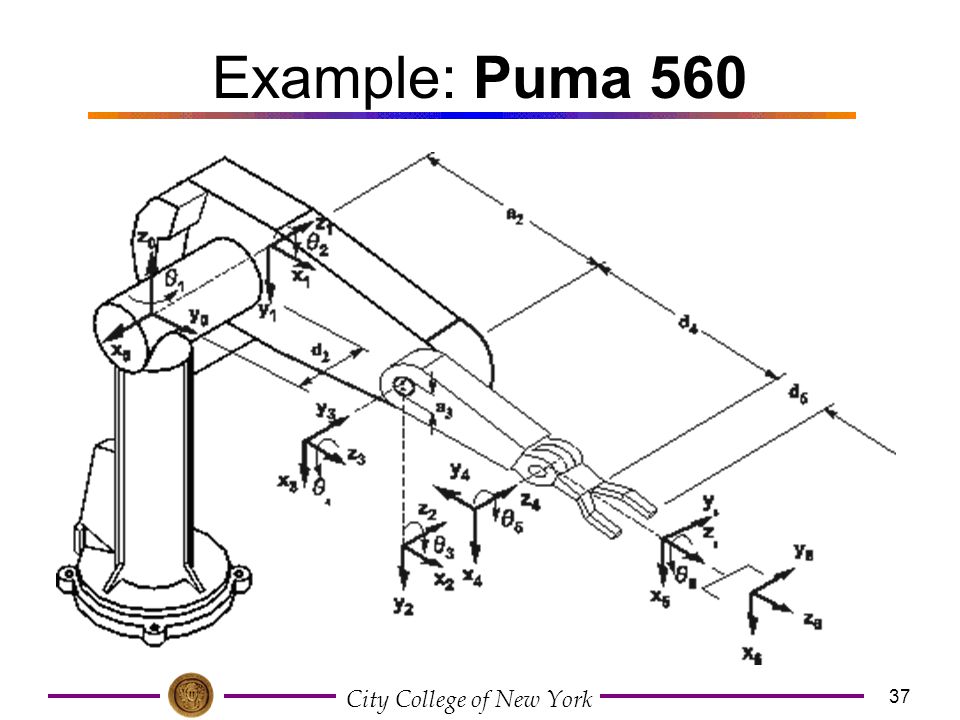
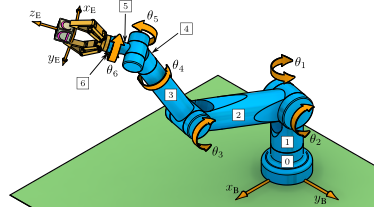
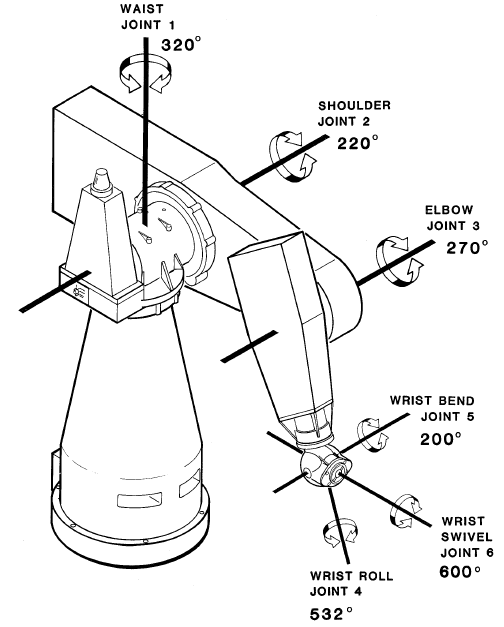
Puma 560 robot manipulator. Unimation puma 560 serially links robot manipulator was u sed as a basis because this rob ot manipulator i s widely used in industry and academic. The unimation puma 560 serially links robot manipulator was used as a basis because this robot manipulator is widely used in industry and academic. Figure 1 d h model. In the case of the puma 560 a gearing arrangement in the wrist of the robot manipulator couples together the motions of joints 4 5 and 6.
This paper describes the matlab simulink realization of the puma 560 robot manipulator position control methodology. This paper describes the matlab simulink realization of the puma 560 robot manipulator position control methodology. Here we adopt the scheme and parameters of b. These simulation models are.
Puma 560 manipulator with the last 3 joints neglected. A detailed description of the puma 560 and its kinematics is given in. Puma 560 is widely used in academic and industrial application and has been modeled with several d h schemes with slightly different measured parameters 1. This implies that a distinction must be made for these three joints between joint space and cartesian space and the kinematics have to be solved in two steps.
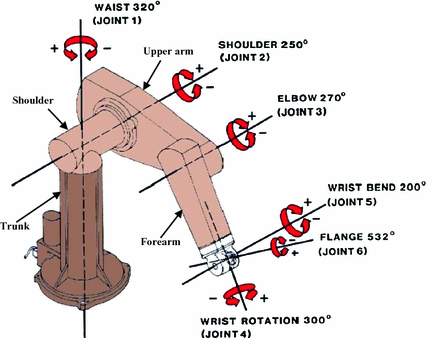
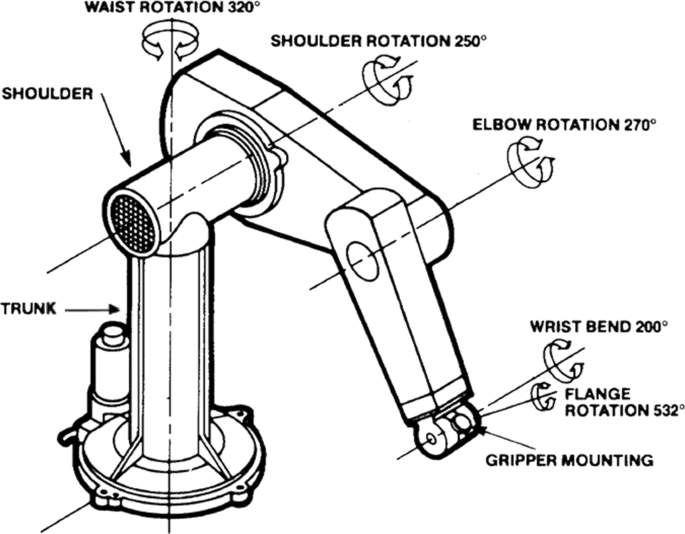
1 puma 560 manipulator. The puma programmable universal machine for assembly or programmable universal manipulation arm is an industrial robotic arm developed by victor scheinman at pioneering robot company unimation initially developed for general motors the puma was based on earlier designs scheinman invented while at stanford university. Unimate puma 500 series robot manipulator simulated with the webots robot simulator. This paper focuses on design analyzed and implements nonlinear computed torque control ctc methods.
Forward kinematics fk was nothing more than a trivial case of constructing a denavit hartenberg d h transformation matrix with puma s parameters obtained from a d h parameter table fig. It has a n onlinear and uncertain dynamic. Unimation produced pumas for years until being purchased by westinghouse.

Robot Puma 560 3d Cad Model Library Grabcad

The Puma 560 At Zero Position By Craig S Modified Dh Parameter 6 Download Scientific Diagram
Puma 560 Robot And Its Dynamic Characteristics Springerlink
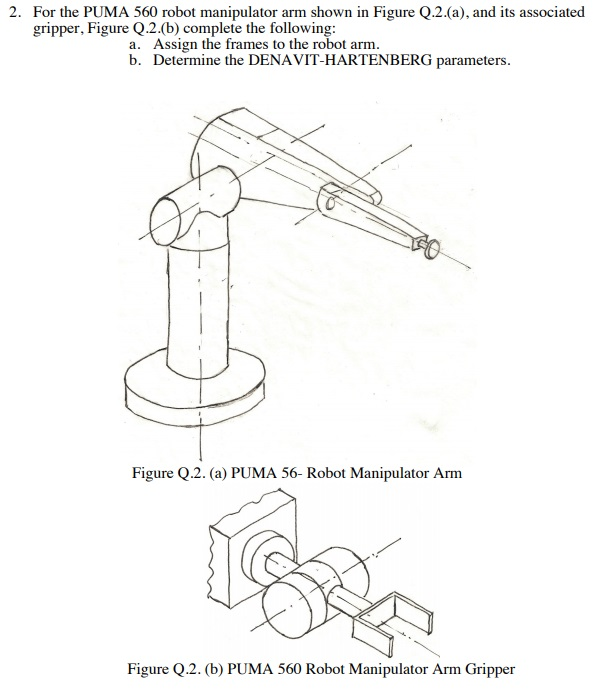
2 For The Puma 560 Robot Manipulator Arm Shown In Chegg Com
Buy Puma 560 Manipulator Up To 75 Off Free Shipping

Pdf Puma 560 Robot Manipulator Position Sliding Mode Control Methods Using Matlab Simulink Semantic Scholar
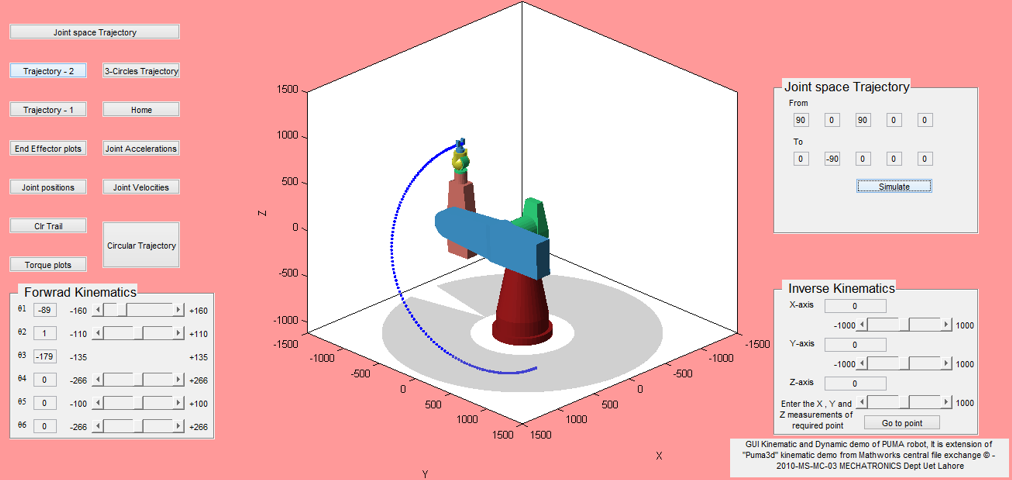
Gui Based Simulation Analysis Of Puma 560 Robotic Arm Javaria Chiragh
Pdf The Explicit Dynamic Model And Inertial Parameters Of The Puma 560 Arm Semantic Scholar

Luc Baron Ph D Eng Professor
Puma 560 Simulator
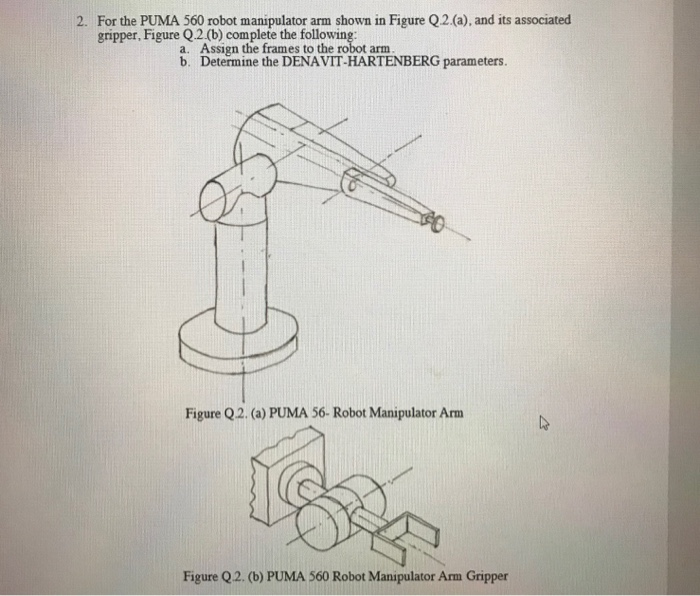
2 For The Puma 560 Robot Manipulator Arm Shown In Chegg Com

Puma 560 Model In Solidworks Download Scientific Diagram

Puma 560 Robot Manipulator Position Sliding Mode Control Methods Usin
Puma 560 Robot Manipulator Position Sliding Mode Control Methods Usin

D H Notation For A Six Degrees Of Freedom Puma 560 Robot Manipulator 2 Download Scientific Diagram

Robotics Infrastructure

Webots Documentation Unimation S Puma 560
A Simulink Based Robotic Toolkit For Simulation And Control Of The Puma 560 Robot Manipulator Unt Digital Library
Https Encrypted Tbn0 Gstatic Com Images Q Tbn 3aand9gcrlihtqzlza6gqxtjmapd7g3bkrtu5ihv1kcmto4hyfckn97jsn Usqp Cau
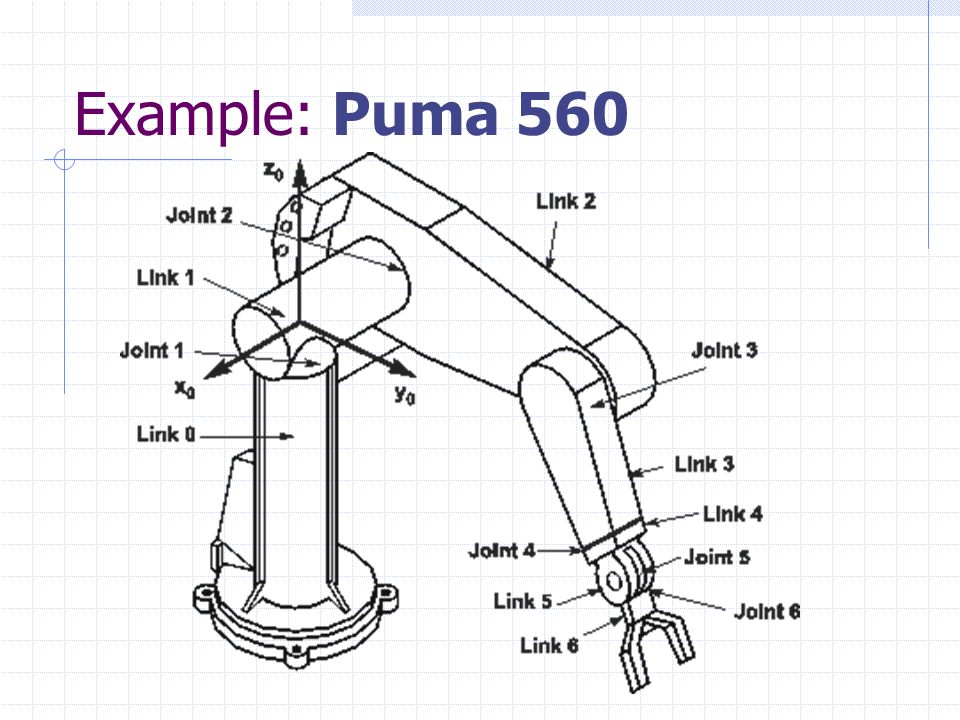
Introduction To Robotics Ppt Video Online Download

Puma 560 Robot Manipulator Youtube

Overview Of The Puma 560 Manipulator Arm 8 11 2015 Youtube
Battle Royale Optimization Algorithm Springerlink
Extra Example Puma 560 Manipulator Jacobian Computation

Pdf Puma 560 Robot Manipulator Position Sliding Mode Control Methods Using Matlab Simulink Semantic Scholar

Pdf Self Tuning Fuzzy Task Space Controller For Puma 560 Robot
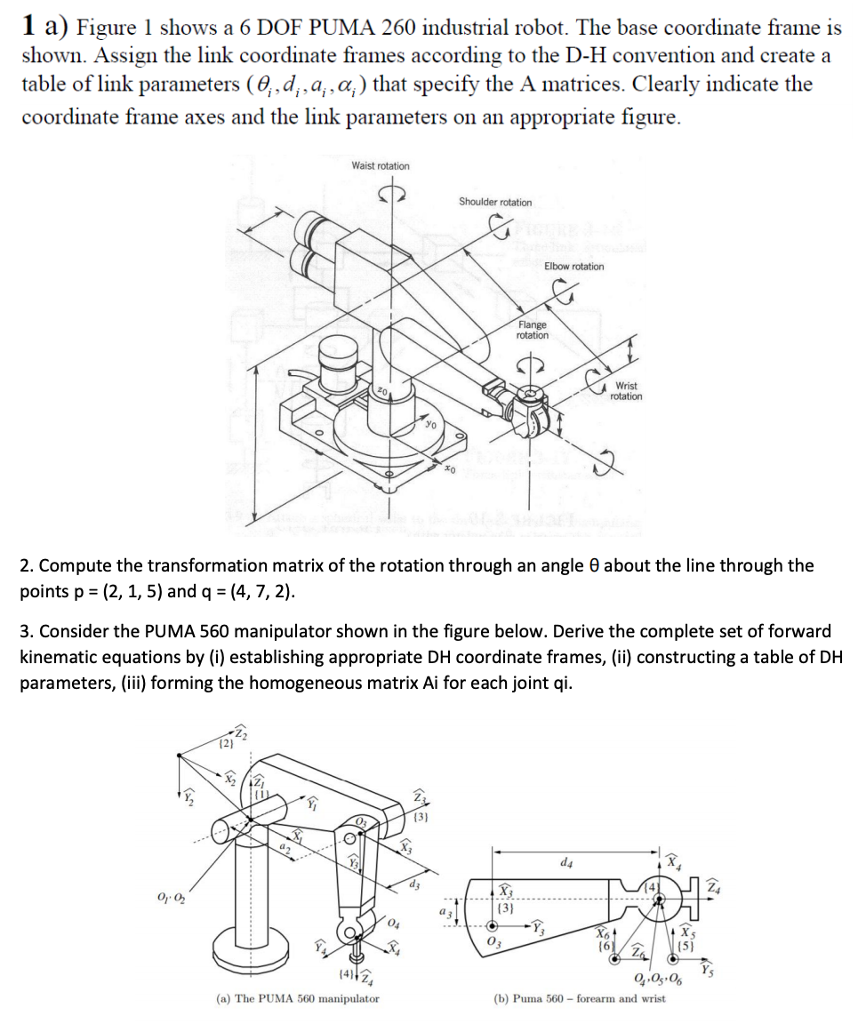
1 A Figure 1 Shows A 6 Dof Puma 260 Industrial Ro Chegg Com

Puma 560 Robot Manipulator Position Sliding Mode Control Methods Usin
2 11 Robotics Ese Mains D H Parameters Of Puma Programmable Universal Manipulation 560 Robot Youtube

Figure 1 From A Simulink Based Robotic Toolkit For Simulation And Control Of The Puma 560 Robot Manipulator Semantic Scholar
2
Github Pascpeli Puma Robot Simulation Simulation Of A Puma 762 Manipulator Capable Of Solving The Forward And Inverse Kinematics Problems
Artificial Control Of Puma Robot Manipulator A Review Of Fuzzy Infer
